

Robôs de Classe
Acessado 17340 vezes.Como citar esse artigo: VERTULO, Rodrigo Cesar. Robôs de Classe. Disponível em: <http://labdeeletronica.com.br/robos-de-classe/>. Acessado em: 17/06/2026.
Há tempos que os robôs deixaram de ser personagens dos filmes de ficção científica e passaram a fazer parte do dia a dia das pessoas, especialmente no setor industrial. É praticamente impossível de se encontrar nos dias de hoje indústrias de médio e grande porte que não tenham ao menos um de seus processos produtivos sendo parcialmente, ou até mesmo integralmente, executados por algum tipo de robô.
Ao se imaginar um robô é muito comum as pessoas terem uma visão bastante limitada sobre esses sistemas. Algumas pensam neles como os cyborgs dos filmes de hollywood, com aparências antropomórficas e dotados de uma incrível inteligência artificial. Outras pessoas, um pouco mais técnicas, acreditam que os robôs se limitam a algumas variações de montagens de braços robóticos semelhantes aos dos seres humanos. O fato é que existem diversas categorias de robôs, e cada uma voltada a aplicações específicas para as quais os sistemas robóticos que fazem parte de uma determinada categoria mostram-se mais adequados.
A classificação dos robôs geralmente é feita dividindo-os nas categorias de Robôs Cartesianos, Robôs Cilíndricos, Robôs Esféricos ou Polares e Robôs Articulados ou Angulares. Cada uma dessas categorias diferem-se entre si pelos tipos de movimentos que podem ser feitos pelos robôs, a partir dos tipos de juntas utilizadas por cada um, e pelo volume de trabalho formado pelos robôs de cada classe.
Para compreender as diferenças entre cada categoria de robôs é importante que se tenha uma visão geral sobre as partes constituintes de um robô e é isso o que será visto no próximo tópico.
As Partes de Um Robô
Os robôs utilizados na indústria são também chamados de robôs manipuladores e são formados basicamente por uma série de corpos rígidos que não se deformam pela ação das forças aplicadas sobre eles. Se houver deformações, o robô perde sua precisão na movimentação e sua aplicação nos processos industriais fica bastante comprometida. A estrutura de um robô é constituída de elos (ou links de acordo com a denominação em inglês) unidos por juntas. A figura 1 apresenta um esquema de um robô destacando seus elos e juntas.
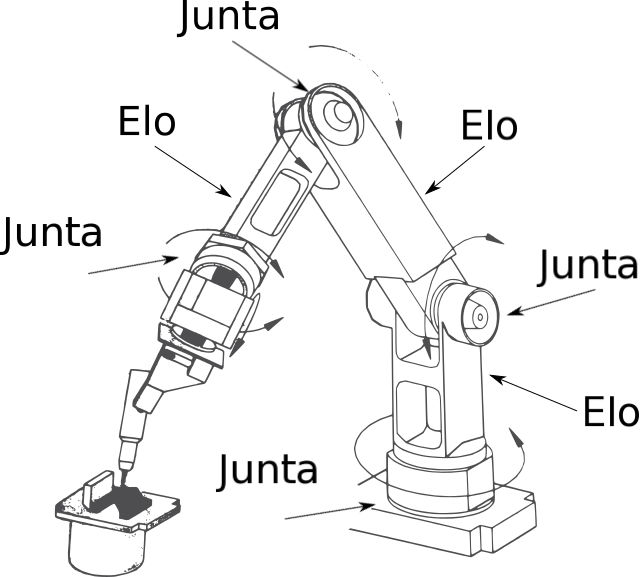
Figura 1 – Representação de um robô com seus elos e juntas destacadas.
Imagem adaptada de PAZOS, Fernando – Automação de Sistemas & Robótica.
Em relação às juntas existem basicamente dois tipos, ou seja, as prismáticas e as de revolução. As do primeiro tipo permitem a movimentação linear dos elos fazendo com que os mesmos possam mover-se para frente e para trás em um dos três eixos (x, y ou z), enquanto as do segundo tipo permitem a movimentação angular dos elos conectados a elas. As juntas prismáticas são comumente identificadas pela letra P, enquanto as de revolução pela letra R. Na figura 2 é possível observar algumas variedades dos dois tipos de juntas.
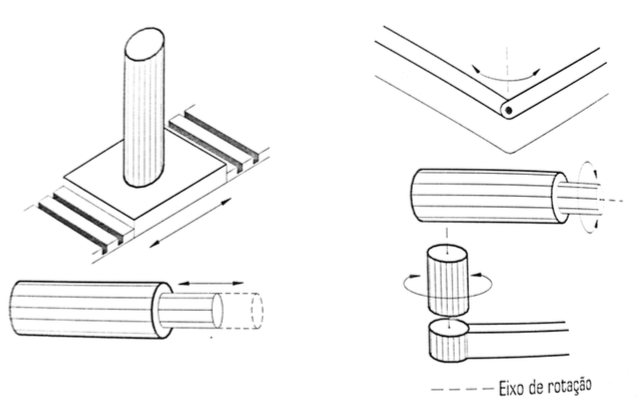
Figura 2 – Representação dos dois tipos de juntas; à esquerda as prismáticas (P) e à direita as de revolução (R).
Imagem extraída de PAZOS, Fernando – Automação de Sistemas & Robótica.
As dimensões de cada elo de um robô e o tipo de junta utilizada para conectar os mesmos influenciam no chamado Volume de Trabalho, que é o espaço total no qual o manipulador robótico pode se movimentar, sendo definido como a trajetória e o espaço alcançado pela extremidade mais longa do robô. De acordo com a quantidade e dimensões dos elos, bem como os tipos de juntas utilizadas, o Volume de trabalho pode assumir diversas formatos diferentes, tais como cubo, esfera, etc. É importante ressaltar que um mesmo robô pode utilizar juntas prismáticas, de revolução ou uma combinação dos dois tipos.
A visão geral dos manipuladores robóticos apresentada até aqui é de fundamental importância para que seja possível entender a forma como os mesmos são classificados e as características de cada categoria. Nos próximos tópicos serão apresentadas e descritas cada categoria de robôs.
Robôs Cartesianos
As categorias de robôs são normalmente definidas de acordo com os tipos de juntas utilizadas para conectar seus elos. No caso dos robôs cartesianos seus elos são conectados utilizando-se juntas prismáticas de modo que seja possível obter-se movimentos lineares nos eixos x, y e z. O volume de trabalho formado por esses robôs é um prisma retangular e eles são comumente classificados como robôs do tipo PPP, sendo uma forma de destacar que nestes robôs existem três elos conectados por três juntas prismáticas. A figura 3 apresenta um robô prismático com as características descritas.

Figura 3 – Representação de um robô cartesiano.
Imagem extraída de PAZOS, Fernando – Automação de Sistemas & Robótica.
Normalmente, os robôs cartesianos são utilizados em situações em que não são necessários movimentos muito complexos; além disso, sua programação costuma ser mais simples.
Robôs Cilíndricos
Outra categoria existente é aquela dos robôs cilíndricos ou RPP, ou seja, que utilizam uma junta de revolução e duas prismáticas. A junta de revolução é posicionada no elo conectado à base do robô, conferindo ao mesmo a possibilidade de realizar movimentos de rotação sobre seu eixo principal. Essa característica faz com que o volume de trabalho deste tipo de robô assuma a forma de um cilindro. As outras duas juntas, as prismáticas, fazem a junção de outros dois elos do robô permitindo ao mesmo a realização de movimentos lineares nos eixos x e y.
A figura 4 apresenta um modelo de um robô cilíndrico; note que o eixo z do mesmo movimenta-se de forma angular e os outros de forma linear.

Figura 4 – Representação de um robô cilíndrico.
Imagem extraída de PAZOS, Fernando – Automação de Sistemas & Robótica.
Os robôs cilíndricos podem realizar movimentos um pouco mais complexos que os cartesianos, mas isso trás aos mesmos um grau de complexidade em sua programação também um pouco mais acentuada.
Robôs Esféricos ou Polares
Os robôs esféricos são caracterizados por possuírem duas juntas de revolução e uma prismática, portanto, RRP. Pela fato de dois dos seus elos realizarem movimentos angulares sua programação é bem mais complexa do que os robôs cartesianos e cilíndricos. Contudo, a quantidade de movimentos que esses robôs são capazes de realizarem também é maior. O volume de trabalho deste tipo de robô assume a forma de uma esfera, sendo que sua movimentação dentro deste volume de trabalho é limitada apenas por restrições mecânicas das juntas. A figura 5 apresenta o modo como cada junta é utilizada no sistema.

Figura 5 – Representação de um robô esférico.
Imagem extraída de PAZOS, Fernando – Automação de Sistemas & Robótica.
A partir da figura 5 é possível notar que as juntas da base e a do “ombro” do robô são de revolução, permitindo movimentações angulares. A terceira junta, do tipo prismática, permite que a ferramenta conectada à extremidade do robô seja movimentada para frente e para trás de modo linear.
Robôs Articulados ou Angulares
Talvez os robôs articulados sejam os mais conhecidos pela maioria das pessoas, pois o formato deles assemelha-se ao de um braço humano. Seus três elos principais são unidos por juntas de revolução, portanto, RRR. Essa característica dá a esses robôs a possibilidade de realizarem uma ampla gama de movimentos, desde os mais simples até os mais complexos. Sendo assim, eles podem ser utilizados para executarem processos complexos que, de outra forma, só poderiam ser realizados por seres humanos. Toda essa flexibilidade de movimentos tem um custo, que é a alta complexidade de sua programação, sendo comum a necessidade de utilizar-se microcontroladores ou microprocessadores. O volume de trabalho desta categoria de robôs, a exemplo do que ocorre com os robôs esféricos, também é formado por uma esfera e qualquer parte deste volume pode ser facilmente alcançado pelo robô devido à sua grande flexibilidade de movimentação.
A figura 6 apresenta um robô articulado, sendo possível notar que todas as suas juntas são prismáticas, conferindo ao mesmo uma ampla gama de movimentos.

Figura 6 – Representação de um robô articulado.
Imagem extraída de PAZOS, Fernando – Automação de Sistemas & Robótica.
Conclusão
Diferentemente do que algumas pessoas acreditam, os robôs ainda não são como os cyborgs mostrados nos filmes de ficção científica, tão pouco se limitam aos tão conhecidos “braços robóticos”. Existe uma variedade de tipos de robôs, cada um voltado para uma ou mais aplicações específicas, sendo os mesmos classificados em diferentes categorias.
Os robôs são atribuídos a cada categoria de acordo com os tipos de juntas utilizadas para unirem os principais elos do mesmos. As juntas são divididas entre prismáticas e de revolução, de modo que as primeiras permitem a movimentação linear dos elos conectados às mesmas e as segundas conferem aos seus elos a possibilidade de realizarem movimentos angulares. As juntas prismáticas são identificadas pela letra P e as de revolução pela letra R. A configuração das juntas de um robô faz com que os mesmos possam atuar em um determinado volume de trabalho, ou seja, a área alcançada por eles.
Os robôs podem ser divididos nas seguintes categorias: Robôs Cartesianos, Robôs Cilíndricos, Robôs Esféricos ou Polares e Robôs Articulados ou Angulares. Os robôs cartesianos possuem seus três elos principais unidos por juntas prismáticas, portanto, são do tipo PPP. Os cilíndricos possuem seus três principais elos unidos respectivamente por uma junta de revolução e duas prismáticas, portanto, RPP. Já os robôs esféricos ou polares têm seus elos principais unidos por duas juntas de revolução e uma prismática, portanto, RRP. Finalmente, os robôs articulados ou angulares possuem seus três elos principais unidos por juntas de revolução, portanto, RRR. Da primeira para a última categoria apresentada, há um aumento da variedade de movimentos passíveis de serem realizados pelos robôs, acompanhada de um aumento na complexidade de sua programação.
Bibliografia
PAZOS, Fernando. Automação de Sistemas & Robótica. Editora Axcel Books do Brasil Ltda. 2002


O Prof. Rodrigo Vertulo é Bacharel em Ciência da Computação e Engenharia Eletrônica, especialista em Engenharia de Software e Técnico em Eletroeletrônica há quase 30 anos. Atuou durante mais de 10 anos como Engenheiro de Software na IBM do Brasil, também foi pesquisador na Universidade Federal de São Paulo e Professor Universitário na Fatec de São Caetano do Sul do Centro Paula Souza. Tem experiência profissional de quase três décadas na área de Ciência da Computação e vasta experiência em projetos de Engenharia Eletrônica.
Comentários