


Motores de Passo, uma Introdução.
Acessado 10825 vezes.Como citar esse artigo: VERTULO, Rodrigo Cesar. Motores de Passo, uma Introdução.. Disponível em: <http://labdeeletronica.com.br/motores-de-passo-uma-introducao/>. Acessado em: 26/05/2026.
Sistemas de automação normalmente são formados por sensores, controladores e atuadores dispostos de forma a trabalharem em conjunto utilizando diversas configurações para resolverem um determinado problema. Os sensores são elementos capazes de “sentirem” o ambiente, gerando, normalmente, sinais elétricos que representam as variações do fenômeno que está sendo observado. Como exemplo pode-se citar os sensores de temperatura, umidade, pressão, e muitos outros disponíveis.
Os sinais elétricos gerados pelos sensores podem ser enviados para controladores, responsáveis por interpretarem e processarem os sinais obtidos. A partir deste processamento alguma ação pode ser executada. É muito comum controladores formados por microcontroladores ou microprocessadores, de modo que o poder computacional destes elementos possam ser utilizados para realizar os mais diversos tipos de cálculos e processamentos com os sinais obtidos pelos sensores. É importante citar que é comum a utilização de conversores analógicos digitais como interface entre os sensores e controladores. Estes conversores são responsáveis pela conversão dos sinais elétricos gerados pelos sensores para uma representação digital passível de ser utilizada para a realização de operações lógicas e algébricas pelos microcontroladores ou microprocessadores.
Depois que a unidade de controle executa seu trabalho, e dependendo da aplicação do sistema, entram em ação os atuadores. Atuadores são dispositivos utilizados em automação de sistemas que são capazes de agir, alterar, influenciar o meio em que estão contidos. Entre os diversos tipos de atuadores existentes, há os motores elétricos. Um motor elétrico basicamente transforma energia elétrica em mecânica. Em sua maioria, o funcionamento dos motores elétricos é baseado na interação entre campos eletromagnéticos, contudo, há motores que funcionam com base em outros princípios eletromecânicos.
Os Motores de Passo são um tipo de motor elétrico, portanto podem ser utilizados como atuadores, capazes de realizar movimentos com precisão e, assim, realizarem tarefas dos mais diversos tipos, dependendo da forma como são utilizados. São comumente encontrados em impressoras, scanners, drives de CD/CDROM, injeção eletrônica de automóveis, máquinas utilizadas em indústrias, equipamentos de usinagem, impressoras 3D, etc. O movimento realizado por esses motores é feito em passos, sendo que cada um corresponde a um certo ângulo de rotação. Os motores mais comuns podem ter de 3 a 72 passos por revolução, indicando quantos passos são necessários para que ele percorra 360 graus.
Além da quantidade de passos por revolução, os motores de passo também podem ser “classificados” de acordo com o seu torque. De forma bastante simplória, o torque do motor pode ser entendido como sendo a sua força. Evidentemente há muitos outros conceitos relacionados ao torque, mas foge do escopo deste texto explorar cada um deles.
Um esquema de como o motor de passo é formado pode ser visto na figura 1 abaixo. Apesar deste esquema ser uma simplificação do como este tipo de motor é montado, ele serve como um excelente ponto de partida para compreender seu funcionamento.
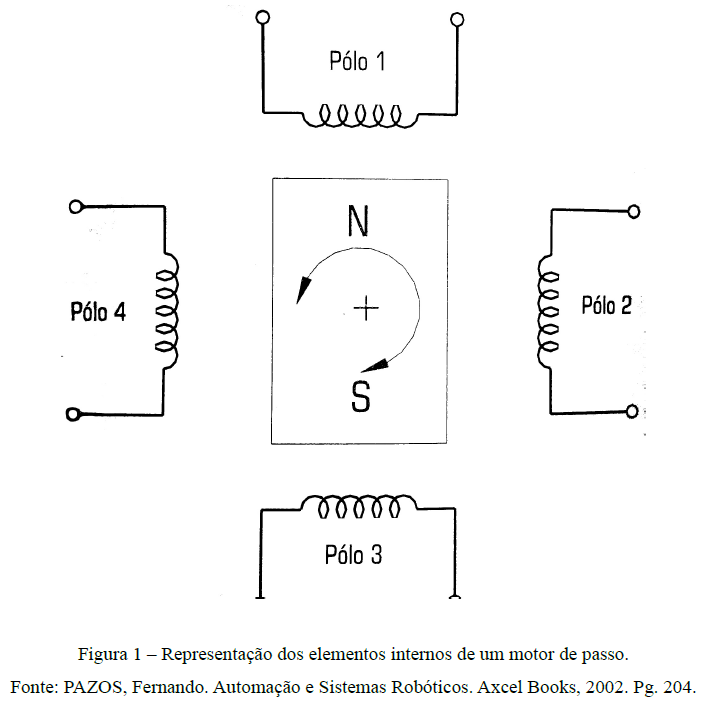
A figura 1 refere-se a um tipo de motor de passo chamado Motor de Imã Permanente (PM – Permanent Magnet). Eles são geralmente utilizados em aplicações não industriais por possuírem um baixo torque e velocidade. Contudo, são de baixo custo e muito utilizados, por exemplo, em periféricos de informática tais como impressoras, drivers de CD/CDROM, entre outros.
Além dos motores de ímã permanente, ainda existem os Motores de Relutância Variável (VR – Variable Relutance), Motores Híbridos, Unipolares e Bipolares. O detalhamento sobre o funcionamento de cada um deles foge ao escopo deste texto que visa apresentar uma introdução sobre o funcionamento dos motores de passo. Contudo, o princípio de funcionamento de todos eles é baseado no que será apresentado a seguir.
A parte central é chamada de rotor e ela está conectada ao eixo do motor, sendo portanto o elemento que “gira”. O rotor é formado por um ou mais ímãs (neste exemplo apenas um) compostos por um pólo magnético Norte e outro Sul. Os Pólos 1, 2, 3 e 4 são bobinas feitas por fios que ao serem percorridas por uma corrente elétrica geram um campo eletromagnético. Estas bobinas formam o que é chamado de estator. O sentido da corrente elétrica que circula por cada bobina determina o sentido de rotação do eixo do motor. O arranjo dos imãs do rotor e das bobinas do estator determina a quantidade de passos do motor e, consequentemente, sua precisão.
Para fazer o rotor girar é preciso acionar as bobinas em uma determinada sequência, de modo a fazer com que o rotor se alinhe com as bobinas conforme esse acionamento é realizado. À medida que o rotor se alinha com as bobinas o eixo do motor vai girando. É sabido do eletromagnetismo que uma corrente elétrica percorrendo um condutor gera um campo magnético ao seu redor. Quando o condutor é enrolado formando uma bobina, gerando o que é chamado de Solenoide, é possível criar-se um eletroímã, contendo um pólo Norte e outro Sul. Também sabe-se que pólos iguais se repelem e opostos se atraem e é utilizando este princípio que um motor de passo é capaz de gerar movimento.
São dois os modos de acionamento mais utilizados para um motor de passo, sendo eles o modo Passo Completo (Full-Step) e o modo Meio Passo (Half-Step). O modo de passo completo pode ser utilizado de duas formas diferentes, sendo que cada uma oferece vantagens e desvantagens. Cada um deles será detalhado a seguir.
Uma das formas de se utilizar o modo de Passo Completo é chamado de “modo simples” e pode ser observado na figura 2 a seguir.

Pela figura 2 é possível observar que cada pólo (1, 2, 3 e 4) é acionado de forma alternada. Quando uma corrente elétrica passa pelo pólo 1, o campo magnético gerado faz com que o imã do rotor tenha seu pólo Norte alinhado com ele. Em seguida a corrente do pólo 1 é interrompida e o pólo 2 passa a ser energizado. O campo magnético gerado atrai o pólo Norte do rotor fazendo o eixo girar, ou seja, um passo foi percorrido. A sequência prossegue fazendo com que o pólo 3 seja energizado ao mesmo tempo que o pólo 2 é desenergizado fazendo novamente o eixo girar executando mais um passo. Finalmente, o pólo 3 é desenergizado e o 4 é energizado, percorrendo mais um passo. A partir deste ponto o pólo 4 é desenergizado e o 1 novamente energizado, reiniciando o clico. A tabela 1 a seguir resume a sequência de acionamento do modo Passo Completo Simples.

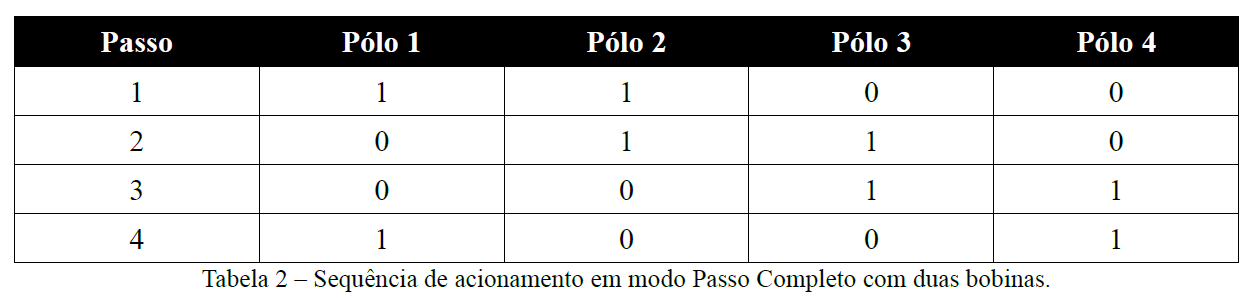
A outra forma de se trabalhar no modo Passo Completo é energizando duas bobinas simultaneamente. Este modo de trabalho ainda faz com que o eixo do motor execute um passo completo por pulso, porém, o torque do motor é incrementado de 30 a 40%. Neste modo de trabalho gasta-se o dobro de energia pelo fato de duas bobinas serem energizadas ao mesmo tempo. A figura 3 apresenta a forma de funcionamento energizando-se duas bobinas ao mesmo tempo.

É possível observar que agora duas bobinas são acionadas ao mesmo tempo e que o ímã do rotor fica posicionado entre as duas. Apesar disso, a cada acionamento ainda executa-se um passo completo. A tabela 2 resume a sequência de acionamento utilizando-se duas bobinas.
Os modos de acionamento descritos acima permitem que o eixo do motor gire um passo por vez. Entretanto, existe uma outra forma de se energizar as bobinas do motor tornando sua movimentação ainda mais precisa, que é utilizando o modo de Meio Passo (Half-Step). Supondo que um passo completo gire o eixo do motor em 30 Graus por pulso, ao utilizar o meio passo o mesmo girará 15 Graus por pulso, fazendo com que seja necessário do dobro de pulsos para que o eixo do motor execute uma volta completa. A figura 4 apresenta um esquema do como o modo de meio passo funciona.
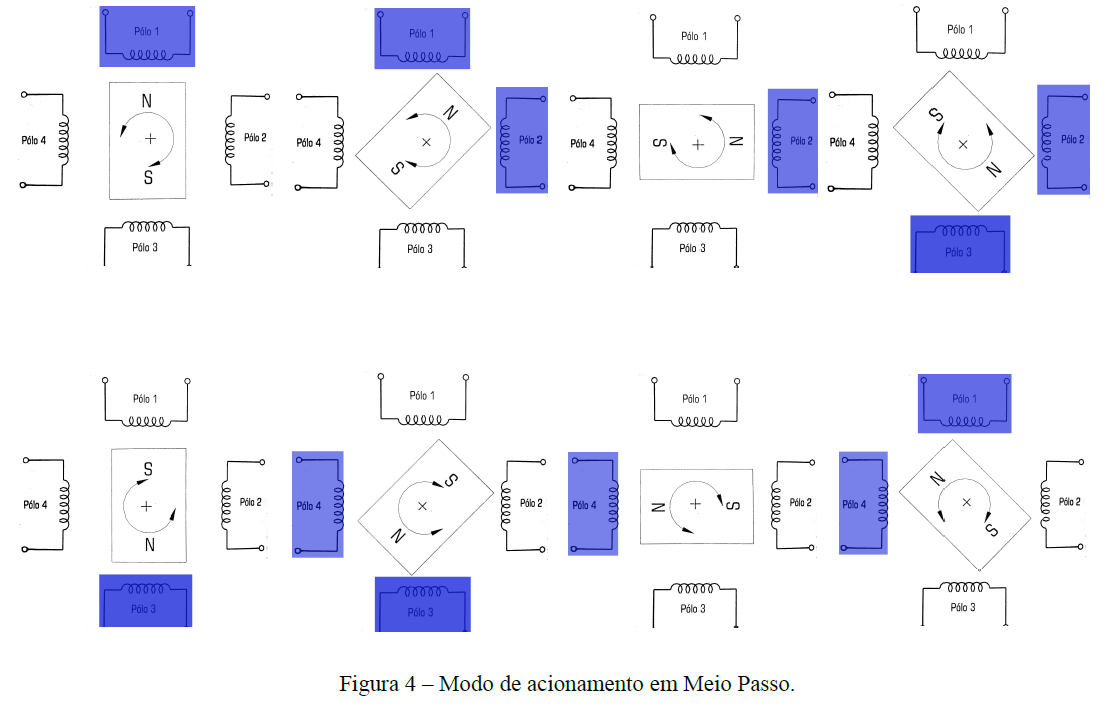
Pela figura 4 é possível observar que o modo de acionamento de Meio Passo é uma “mistura” dos dois modos anteriores. Também nota-se que agora o rotor gira com um ângulo cujo valor é metade do que ocorria anteriormente. Essa característica aumenta a precisão do motor de passo, porém, reduz sua velocidade. Também é importante destacar que o torque do motor nessa situação é maior do que no modo Passo Completo Simples, contudo, menor do que o torque no modo Passo Completo com duas bobinas. A tabela 3 a seguir apresenta a sequência de acionamento das bobinas para o modo de meio passo.

Independentemente do modo de trabalho, ou seja Passo Completo Simples, com duas bobinas ou Meio Passo, a sequência de pulsos em cada bobina pode ser executada utilizando-se circuitos controladores disponíveis no mercado ou criados de modo customizado. Também podem ser utilizados microcontroladores programados para enviarem os pulsos na ordem correta, em conjunto com drivers de potência para a energização de cada bobina.
Os motores de passo são elementos importantes em projetos de automação industrial e no desenvolvimento de dispositivos mecatrônicos em geral. Compostos por diversos tipos, tais como os de Ímã Permanentes, Relutância Variável, Híbridos, Unipolares e Bipolares, seu funcionamento baseia-se nos princípios do eletromagnetismo. Sua grande precisão deriva do fato de ser possível controlar com exatidão a quantidade de passos que se deseja executar, podendo-se alcançar uma precisão ainda maior quando trabalha-se com meio passo. O conhecimento dos princípios de funcionamento deste dispositivo é de fundamental importância para todos aqueles envolvidos com projetos que envolvam, de alguma forma, eletrônica e mecânica.


O Prof. Rodrigo Vertulo é Bacharel em Ciência da Computação e Engenharia Eletrônica, especialista em Engenharia de Software e Técnico em Eletroeletrônica há quase 30 anos. Atuou durante mais de 10 anos como Engenheiro de Software na IBM do Brasil, também foi pesquisador na Universidade Federal de São Paulo e Professor Universitário na Fatec de São Caetano do Sul do Centro Paula Souza. Tem experiência profissional de quase três décadas na área de Ciência da Computação e vasta experiência em projetos de Engenharia Eletrônica.
Comentários
Anibal
Muito bom, simples e didático!
Wagner Quintiliano de Almeida
.Estou com dificuldades no mapa de Karnout com 2,3,4 variáveis preciso de mais um entendimento a teoría já fala continuidade portas logicas,mas nunca ví vídeo ,slids para praticar um pouco mais e saber para que isto é importante na logica,etc…
Ricardo Brito
Excelente post , vocês estão de parabéns!
wellingdon
Muito bom este post, arduino uma plataforma que para quem quer explorar a imaginação é muito bom
att.
http://www.grigocollection.com.br/sunga-boxer